
日本は、月探査の多様な計画を進めており、特に「SLIM」プロジェクトと「HAKUTO-R」プロジェクトが注目されています。これらは、月面の科学探査や資源利用を目指した国際的な取り組みの一部です。
SLIMプロジェクトの概要
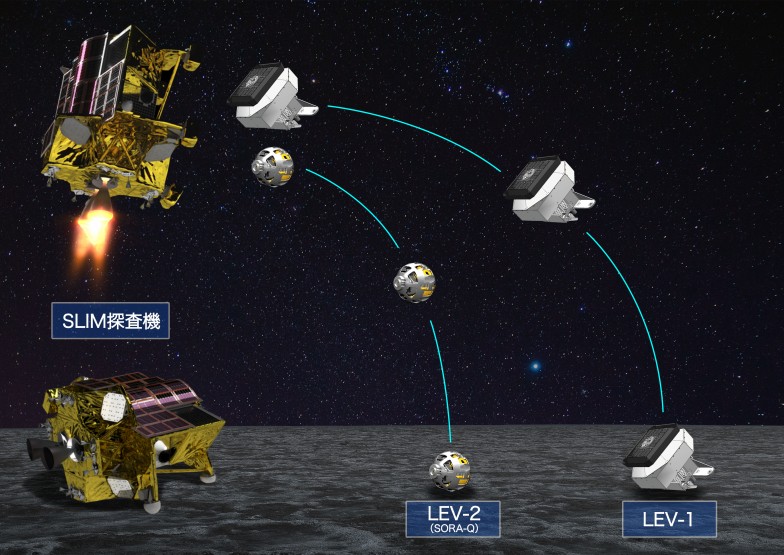
SLIM(Smart Lander for Investigating Moon)プロジェクトは、宇宙航空研究開発機構(JAXA)が主導する小型月着陸実証機の開発プロジェクトです。2024年1月に日本初の月面着陸を達成し、日本はこれで月面着陸を成功させた5番目の国になりました。
SLIMの目標と成果
しかし、50メートルほどの高さでエンジンのトラブルが発生し、推力が低下してしまいました。その結果、逆立ちするような姿勢で軟着陸になってしまいました。でも、SLIMは着陸目標地点から約55メートル離れた場所に着陸し、100メートル以内の高精度着陸という目標を達成しました。
撮影された画像をもとに、JAXAはSLIMの着陸性能を評価しました。結果として、SLIMは着陸目標地点から約55メートル離れた場所に着陸し、100メートル以内の高精度着陸を達成しました
引用元 : sorae 宇宙へのポータルサイト https://sorae.info/space/20220325-soraq.html

HAKUTO-Rプロジェクトの概要
HAKUTO-Rプロジェクトは、民間企業のispaceが進めている月面探査プログラムです。
このプロジェクトは、低コストで頻繁に月面に物を運ぶサービスを提供することを目指しています。そこで、月面に安全に着陸し、探査を行うための特別なランダーとローバーを開発しています。
HAKUTO-Rの目標と成果
HAKUTO-Rの最初のミッション(ミッション-1)は、2022年12月に月面着陸を試みましたが、ランダーの誤作動で上空5キロメートルで「着陸」と誤認され、1分後に燃料が切れて高速で落下してしまいました。
その後、HAKUTO-Rミッション-2は2025年1月15日に打ち上げられ、今年の5月頃に再び月面着陸に挑戦する予定です。
両プロジェクトの主な違い
目的とアプローチ
- SLIMプロジェクトは、主に「科学技術の実証」に重点を置いています。特に、精密な着陸技術の開発に特化しており、月面の特定の地点に安全に着陸することを目指しています。また、SLIMは小型で軽量な設計になっており、コストを抑える役割も果たしています。
- HAKUTO-Rプロジェクトは、商業的な要素が強く、ビジネスモデルとしての月面探査に焦点を当てています。国際的な協力を得ながら、月面での探査を行い、得られたデータを商業的に活用することを目指しています。
開発主体の違い
- SLIMプロジェクトは、公的機関であるJAXAによって進められています。これにより、国家プロジェクトとしての信頼性が高まっています。
- HAKUTO-Rは民間企業のispaceが主導しています。民間からの資金調達を受けているため、プロジェクトの進行が柔軟になりますが、市場の影響を受けやすい面もあります。
技術のアプローチ
- SLIMは、月面の特定の場所に正確に着陸する技術に特化しています。目標は、ピンポイントでの着陸を実証することです。このピンポイント着陸技術は、他国の宇宙開発計画にも影響を与え将来的に他の重力天体への探査を可能にする基盤となります。
- HAKUTO-Rは複数回のミッションを通じて、月面への輸送や探査のシステムを構築することを目指しています。月の商業利用の可能性を探るための高精度な探査やデータ収集を重視しています。例えば、NASAと一緒に月や火星への輸送サービスを提供することを考えているんです。
独自の特色
SLIMとHAKUTO-Rの両プロジェクトは、それぞれ独自の特色を持っています。特に、SLIMは月のクレーター斜面にピンポイント着陸する技術を開発しています。
この技術は、月面での採取や調査において大きな成果をもたらし将来的に他の重力天体への探査を可能にする基盤となります。この技術が他国の宇宙開発計画にも影響を与えることが期待されています。
HAKUTO-R(ISPACE社)は、他の国の宇宙機関とも協力しています。
例えば、NASAと一緒に月や火星への輸送サービスを提供することを考えています。
一方、SLIMは日本国内の研究者との協力を強化しています。大学や研究機関と一緒に新しい技術を開発するための連携を進めています。
こうして、ISPACEとSLIMは技術の進歩だけでなく、世界中の国々との協力も強化しています。
SLIMプロジェクトのさらなる成果
SLIMプロジェクトは、2024年10月に終了しました。
SLIMは、月面で非常に正確に着陸する技術を実証しました。この技術は、着陸の精度が約10メートルという評価を受けています。
また、SLIMは月面で複数のローバーが一緒に協力して探査することに成功しました。これは技術的な面で大きな成果です。
SLIMは、3回の夜をこえて通信を成功させました。非常に寒い夜や暑い昼でも、機器が正常に動作することが証明されました。この成果は、将来の長期間にわたる月面探査に役立つ技術をさらに進化させる助けとなります。
SLIMプロジェクトが正確な着陸技術を実証することで、HAKUTO-Rの月面探査や新しい商業機会にも影響を与えるでしょう。
HAKUTO-Rプロジェクトの新たな視点
2025年1月15日に2回目のミッションが打ち上げられ、今年の5月ごろに月面に着陸する予定です。HAKUTO-Rに搭載される小型ローバーは、SLIMとは異なる探査機能を持っています。
特に、ローバーが自分で動いて月面を探査する技術を発展させる可能性があります。これは、将来の収入源を確保するためにとても重要です。
さらに、AKUTO-Rは宇宙での商業活動の先駆けとなり、ITや自動車業界など他の分野とも連携する可能性があります。
未来の方向性と新しい技術
SLIMやHAKUTO-Rプロジェクトで得た技術は、将来の火星や小惑星への探査にも役立ちます。これにより、宇宙探査がさらに進むことが期待されています。
また、これらのプロジェクトは、新しいビジネスモデルや技術の進化を示し、宇宙探査の可能性を大きく広げています。